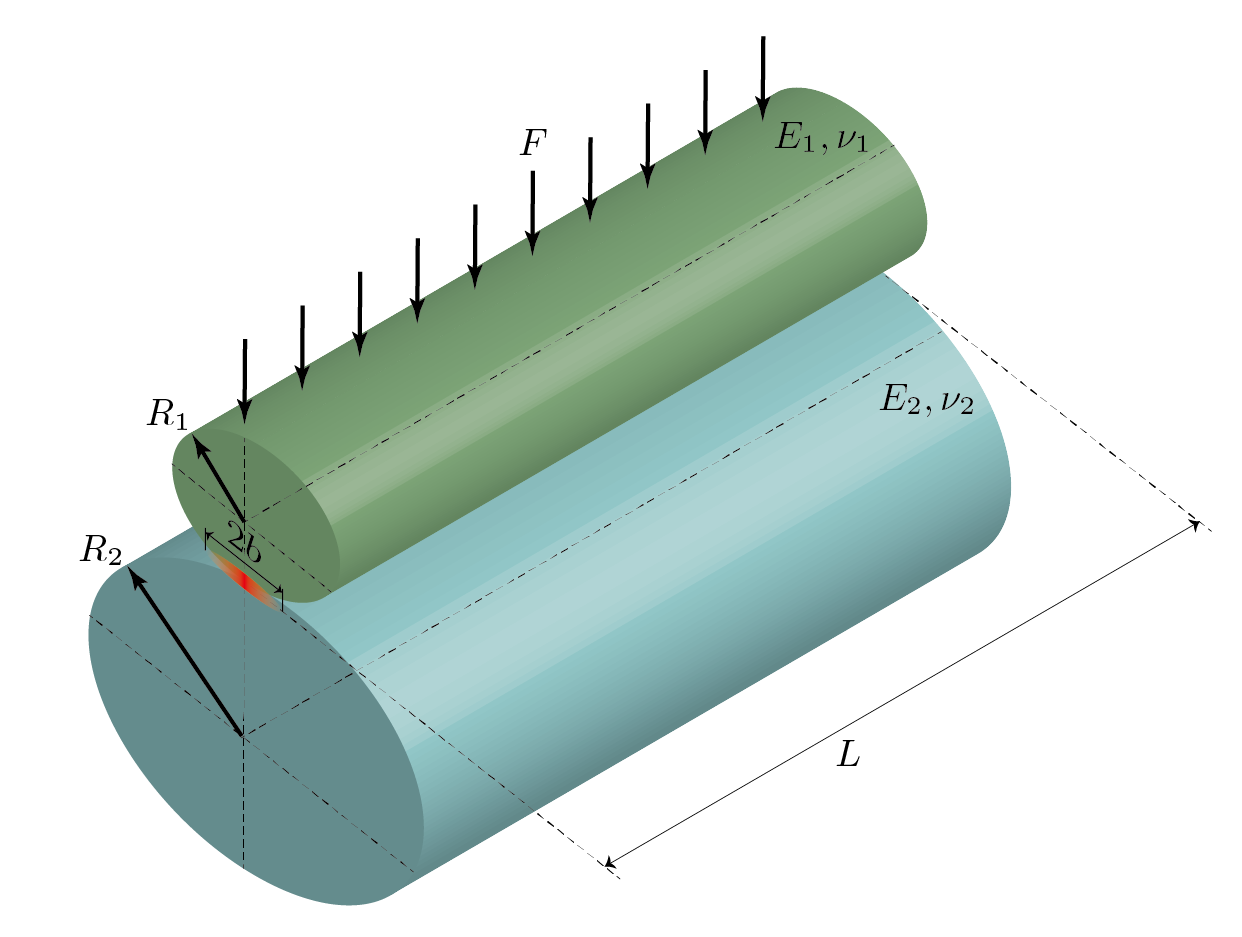
As Pereira said "Only the Johson and the Radzimovsky models are
suitable to describe the contact involving colliding cylinders in most
of practical applications."
% initial value for fit n = 10/9; k0 = 1e10; n0 = 1; % fitfun1(): k is unknown fitfun1 = @(k,delta) k.*delta.^n; % n = 9/10 % fitfun2(): k and n are unknown fitfun2 = @(para,delta) para(1).*delta.^para(2); % para is established for nlinfit()
% fit for Radzimovasky model % fitfun1 [kRadzi1, ~,~,~,MSERadzi1,~] = nlinfit(deltaRadzi, F, fitfun1, k0); % fitfun2 [fitParaResult, ~,~,~,MSERadzi2,~] = nlinfit(deltaRadzi, F, fitfun2, [k0, n0]); kRadzi2 = fitParaResult(1); nRadzi2 = fitParaResult(2); % plot for Radzimovasky model plot(deltaRadzi,F,... "LineWidth",2); hold on plot(deltaRadzi,fitfun1(kRadzi1,deltaRadzi),... 'o',... 'MarkerIndices', 1:num/20:num); hold on plot(deltaRadzi,fitfun2([kRadzi2,nRadzi2],deltaRadzi),... 's',... 'MarkerIndices', 1:num/20:num); hold off xlabel('$\delta$ (m)','Interpreter',"latex") ylabel('$F$ (N)','Interpreter',"latex") title('Line Contact - Fit Model - Radzimovasky') legend( 'Radzimovasky model',... '$F = k_{Hertz} \delta^{10/9}$',... '$F = k_{Hertz} \delta^n$',... 'Interpreter',"latex",... "Location","best")
1 2 3 4 5 6 7 8
% print fit result fprintf([' k unknow k and n unknow\n' ... 'n %6.6f %6.6f\n'... 'KHertz %6.2e %6.2e\n'... 'MSE %6.2e %6.2e'],... n, nRadzi2,... kRadzi1, kRadzi2,... MSERadzi1, MSERadzi2);
% fit for Johnson model % fitfun1 [kJohnson1, ~,~,~,MSEJohnson1,~] = nlinfit(deltaJohnson, F, fitfun1, k0); % fitfun2 [fitParaResult, ~,~,~,MSEJohnson2,~] = nlinfit(deltaJohnson, F, fitfun2, [k0, n0]); kJohnson2 = fitParaResult(1); nJohnson2 = fitParaResult(2); % plot for Radzimovasky model plot(deltaJohnson,F,... "LineWidth",2); hold on plot(deltaJohnson,fitfun1(kJohnson1,deltaJohnson),... 'o',... 'MarkerIndices', 1:num/20:num); hold on plot(deltaJohnson,fitfun2([kJohnson2,nJohnson2],deltaJohnson),... 's',... 'MarkerIndices', 1:num/20:num); hold off xlabel('$\delta$ (m)','Interpreter',"latex") ylabel('$F$ (N)','Interpreter',"latex") title('Line Contact - Fit Model - Johnson') legend( 'Johnson model',... '$F = k_{Hertz} \delta^{10/9}$',... '$F = k_{Hertz} \delta^n$',... 'Interpreter',"latex",... "Location","best")
1 2 3 4 5 6 7 8
% print fit result fprintf([' k unknow k and n unknow\n' ... 'n %6.6f %6.6f\n'... 'KHertz %6.2e %6.2e\n'... 'MSE %6.2e %6.2e'],... n, nJohnson2,... kJohnson1, kJohnson2,... MSEJohnson1, MSEJohnson2);
Output:
k unknow
k and n unknow
n
1.111111
1.160895
KHertz
3.94e+09
5.80e+09
MSE
7.10e+07
1.72e+06
Reference
Hale, Layton C. Appendix C: Contact Mechanics, in "Principles and
techniques for desiging precision machines." MIT PhD Thesis, 1999. pp.
417-426.
K. L. Johnson, “Non-Hertzian normal contact of elastic bodies,” in
Contact Mechanics, Cambridge: Cambridge University Press, 1985, pp.
107–152.
A. C. Fischer-Cripps, "Elastic Contact," In Introduction to Contact
Mechanics. Mechanical Engineering Series, Boston: Springer, 2007, pp.
101-114.
Cândida M. Pereira, Amílcar L. Ramalho, Jorge A. Ambrósio. A
critical overview of internal and external cylinder contact force
models. Nonlinear Dynamics, 2010, 63 (4), pp.681-697.
Some slids in web:
https://my.mech.utah.edu/~me7960/lectures/Topic2-FundamentalsOfErrors.pdf