振动传感器主要性能指标
灵敏度
灵敏度是指沿传感器的测量方向,对应于每一单位简谐机械量的输入,其开路时电信号的输出,即输出比输入。
- 输入的机械量:\(x=X\sin(\omega t +\alpha)\)
- 输出的电信号:\(e=E\sin (\omega t+ \alpha - \theta)\),\(\theta\) 为相移,即输出的电信号\(e\)对被测机械量\(x\)的相位滞后
- 灵敏度:\(s=E/X\) (电信号单位 / 机械量单位)
通常,\(X\) 是位移、速度、加速度、力、应变等,\(E\) 是电压、电荷等。
分辨率
分辨率是指传感器可感受到的被测量的最小变化的能力。
也就是说,如果输入量从某一非零值缓慢地变化,但变化值未超过某一数值 \(\Delta X\) 时,传感器的输出变化量 \(\Delta E =0\) ,即传感器对此输入量的变化是分辨不出来的。只有当输入量的变化超过分辨率时,其输出才会发生变化。
\(\Delta X\) 越小,灵敏度越高,分辨率也越高。灵敏度越高,传感器的信噪比将相应下降,这将降低测量结果的精度,故应综合考虑。
线性度和线性范围
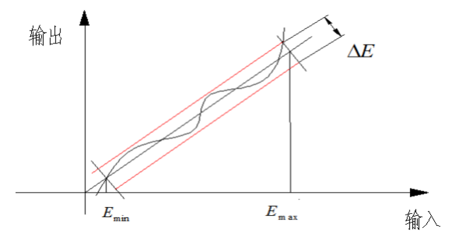
通常情况下,传感器的实际静态特性输出是条曲线而非直线。在实际工作中,为使仪表具有均匀刻度的读数,常用一条拟合直线近似地代表实际的特性曲线。
线性度(非线性误差)\(\gamma\) 就是这个近似程度的一个性能指标,定义为在全量程范围内实际特性曲线与拟合直线之间的最大偏差值与满量程输出值之比。
\[ \gamma=\frac{ \Delta E }{ E_{max} - E_{min} } \times 100 \\% \]
线性范围是指传感器测量量与实际被测量之间保持近似线性关系的范围。
频率范围
频率范围是指传感器的灵敏度随频率的变化量不超出某一给定的误差限的频率范围(频率上限和下限)。传感器的频率范围取决于: 1. 机械接收部分的频率特性。 1. 机电变换部分和所用二次仪表的频率特性。 1. 传感器的安装条件也影响频率上限。
备注: * 在制定测量方案时,首先要看传感器的频率范围是否满足测量的要求 * 压电式加速度传感器具有较宽的频率范围,而且频率上限也比较高 * 电阻式、压阻式和伺服式等三种加速度传感器都具有零频率响应,其中压阻式也具有较高的上限频率
固有频率与安装谐振频率
对于惯性式接收传感器,其机械接收部分是由质量块、阻尼器、弹簧构成的单自由度振动系统,其质量、阻尼、刚度分别为 \(m, c, k\)。该振系统无阻尼自由振动的频率 $ _n = $ 被称为传感器的固有频率。
传感器产生共振时的最低频率称为安装谐振频率,若安装刚度是有限的(实际上也很难达到无穷大),则其对传感器的接收特性将有较大影响。
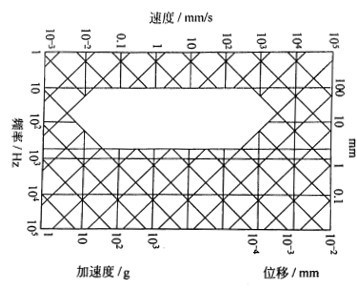
工作范围
频率范围和线性范围一起决定了传感器的工作范围。工作范围可以从诺谟图(Nomogram)中得到
横向灵敏度与方向特性
横向灵敏度主要是由于最大灵敏度轴与传感器的几何轴线不重合而引起的。这是由于传感器加工、安装上的间歇误差等条件造成的。最大灵敏度的轴线与几何轴线间的夹角为 \(\theta\),最大的横向灵敏度表示为:
\[ s_t=\tan \theta \]
备注: * 加速度传感器的外壳上的红点被用来表示横向灵敏度的方向。 * 一般令红点和传感器中心的连线,与振幅最大的非被测振动方向垂直,以减少测量误差。
动态范围
动态范围是指某一输入机械量的幅值范围(用分贝表示),该范围内传感器的灵敏度随输入机械量幅值的变化量不超出某一给定的误差限。
\[ D=20 \lg \frac{X_{max}}{X_{min}} \]
动态范围越大,说明传感器对幅值变化的适应能力越强。比如 \(D=80dB\),则幅值上限与下限之比达10000倍。传感器的量程即是指其幅值上限与下限值的代数差。
其他
传感器的其它性能参数还包括其质量、重复性、稳定性、输入输出阻抗、阻尼、迟滞、零飘、过载能力、以及它的工作环境条件等。